HUMAN MOTION ANALYSIS
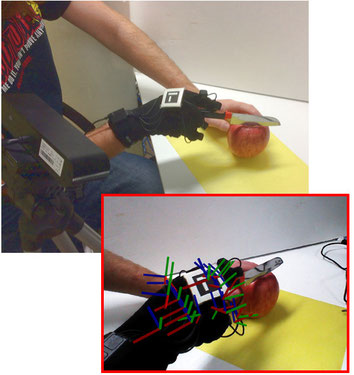
ヒトの手は器用な動作を容易に実現することができます。ロボットでヒトのような器用さを実現しようと考えた場合、一つのアプローチはヒトの動作を参考にすることです。本研究室では、ヒトのマニピュレーションに関する動作をキャプチャし、その動作を直接的にロボットに適用したり、動作を一旦解析してキーとなる要素を抽出した上でロボットに適用したりすることで、ヒトの器用さを実現することを目指しています。左の写真では、ヒトが料理をする場合の包丁で切る動作をキャプチャしているところです。ここでは、指の動作を取得するためにデータグローブを用い、また手の空間内での絶対位置を取得するためにARマーカを用いています。