HUMAN MOTION ANALYSIS
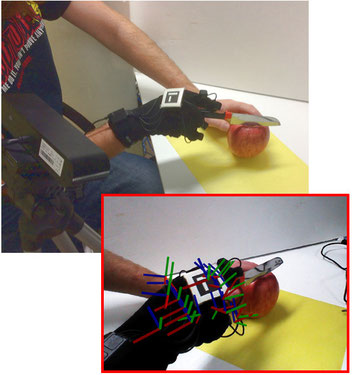
Human hands can easily achieve dexterous movements. One approach to achieve human-like dexterity in robots is to use human actions as a reference. In our laboratory, we aim to realize human dexterity by capturing human manipulation behaviors and applying them directly to robots, or by, first, analyzing the behaviors once, extracting key elements, and then applying them to robots. In the photo on the left, we are capturing the action of cutting with a knife when a human cooks. Here, a Dataglove is used to capture finger movements and the AR markers are used to capture the absolute position of the hand in space.